Development Team Report / April 2015
by Ted Hall • April 27, 2015 • News
TOPIC 1: On Handibot 2.0 and Accessories
“I really want to get the Handibot V2.0 in June. Will it be relatively easy to add the 5th axis and 3D print head when available? Also, do you have any preliminary prices for the 2.0, 5th, and printing?”
We got this query the other day. Given that in response to everyone who is patiently waiting for the Rotary Indexer and Crawler, all I can say is that each is “any-day-now”, I thought that instead of more explanations I would try and respond to these specific questions about other projects.
First, based on the dialogue here and elsewhere, V2.0 will have the same work envelope as the current Handibot and that it will be priced about the same. We are also still hoping that with it we will begin shipping the new FabMo Control System and software.
We do have a 3D print-head (of the “fused deposition” type) that we sell as a “ShopBot Lab” project intended for use with our Desktop CNC’s. Since the Handibot is built from the same control components as the Desktop, it would be pretty straightforward to hook one up on a Handibot. The only problem is the practical one of getting the mechanical components bracketed so that the extrusion-head will be centered in the router holder – assuming you are OK with having power supply and temperature controller mounted separately from the Handibot. It seems important to us to center the head in the Handibot because its work area is small, we’d hate to lose any more of area by having the extruder off to one side as it is for the Desktop. We did not worry about this space consideration in developing the print-head bracketing for the Desktop.
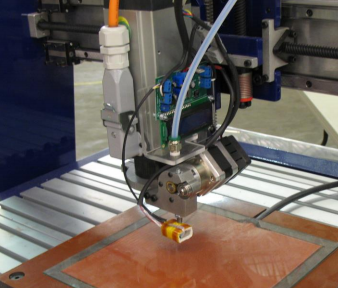
3D Printhead next to spindle on ShopBot Desktop CNC tool
We are certainly happy to have people experiment with this print-head or others on their Handibots. And eventually, we plan to have a mounting arrangement that allows quickly swapping in and out of the tool – eventually, we’d like to see even more robust 3D printing technology with the Handibot. But at this point, 3D printing is not our highest priority for Handibots.
That’s because, while we appreciate the “cool” factor and the important educational value of additive methods, low-end-printing is currently pretty limited in the quality and utility of fabricated parts. It’s not that we are opposed to additive digital fab. I personally believe that, 20 years from now, smart nano-materials will be self-assembling themselves into some of our most useful goods. But there are already a number of small, inexpensive, 3D printers that can sit right next to your Handibot and adequately build-up your small plastic articles – our print head won’t do any better. It will probably be later in the summer before we focus here on adapting the print-head to the Handibot – that should not stop anyone who wants to experiment. The additional driver can be relatively easily added to Handibots and used to control a print-head motor, just as it would control an Indexer or Crawler. The driver is included with the print-head kit from the ShopBot Labs store, along with a heated bed).
In terms of the next steps in 3D printing, what we are anxious to see are digital fabrication strategies that integrate additive and subtractive approaches. With such an approach the additive process might be viewed as providing relatively low-resolution initial material deposition, somewhat like casting, with subtractive machining then used to provide precision or finish in critical areas. This approach was used in a recent 3D-printed automobile.
Several full-size ShopBots are currently being used to explore large format 3D printing. Here’s one big 3D printer at Florida State University.
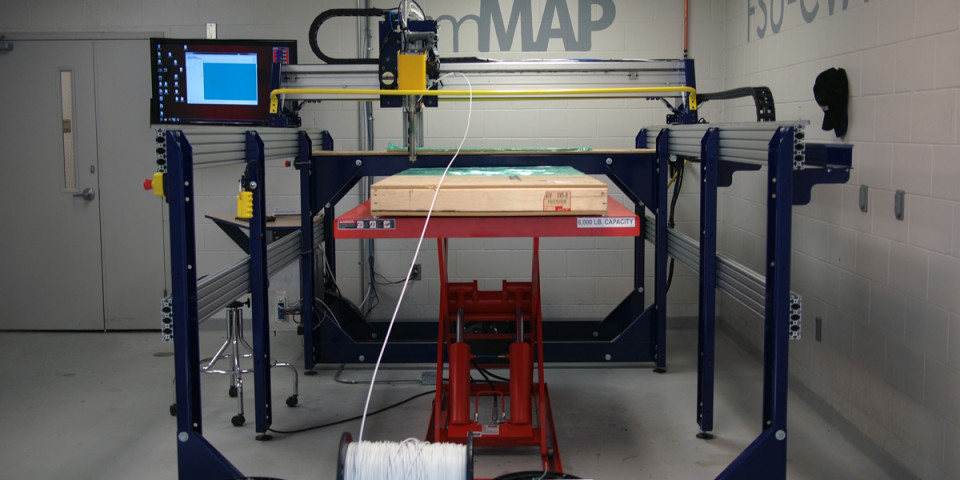
Large-bed 3D printer at Florida State University, based on ShopBot gantry tool
The 4-axis rotary tool is coming very soon. However, the 5-axis Handibot is going to be later – it is not on the development team schedule until the fall. Our “alpha” prototype is in the field being tested at the moment and we are hoping to learn a lot from it. That particular version, being built from the same components as our full-size 5-axis tool, is likely to be an expensive addition to a Handibot – probably $6,000 to $7,000 extra. It will be very rigid and ready to machine small wood, plastic, and aluminum milling projects. But we are also planning a manual, 3+2 indexing system, that will allow 5-axis machining to be done on a budget, albeit less efficiently. We would expect the manual 3+2 approach to be inexpensive and well suited to education.

5-Axis Handibot Prototype
TOPIC 2: On Open Source Licensing
Handibot is an open source innovation project. We intend it to be open in all reasonable ways, hardware and software. Specifying how we will do open source software is pretty straightforward. But the concept of open hardware is still much in flux. We’ve spent a lot of time pondering exactly how we want to handle it for Handibot. For that reason, to date, we have not posted a commitment to any specific licensing framework.
Attached now is a draft of what has evolved as our position on the licensing of Handibot’s open hardware and software. It should be pretty self-explanatory. This is still just a draft – so we would be happy for any thoughts you have, either publicly or privately.